8. Robot v neviditeľnej ohrade
Cieľ: pripojiť a použiť senzor na rozpoznanie farby, odčítať hodnoty zo senzora a vedieť identifikovať čiernu, bielu a hodnoty medzi nimi, naprogramovať robota tak, aby sa pri identifikácii čiary otočil a šiel ďalej.
Poznámka pre učiteľa: Pri upevnení senzoru sa musia žiaci zamerať na stabilitu senzoru. Ideálne je upevniť ho do stredu v prednej časti robota. Ďalší dôležitý faktor je umiestnenie senzoru v správnej výške od povrchu (ideálne je cca 1,5 cm). Upnutie príliš vysoko spôsobuje nežiadúci rozptyl, príliš nízko zas spôsobuje problémy pri pohyboch robota prípadne nepresnosti pri meraní.
Aj pri tejto úlohe je dôležité pracovať postupne. Najprv robota naprogramovať tak, aby zastavil na čiernej čiare resp. ešte skôr a teda na rozmedzí bielej a čiernej. Pri použití EV3 farebného senzora je preto dôležité použiť ho ako svetelný senzor nakoľko pri zaznamenaní čiernej farby vo vyššej rýchlosti, môže robot zareagovať príliš neskoro.
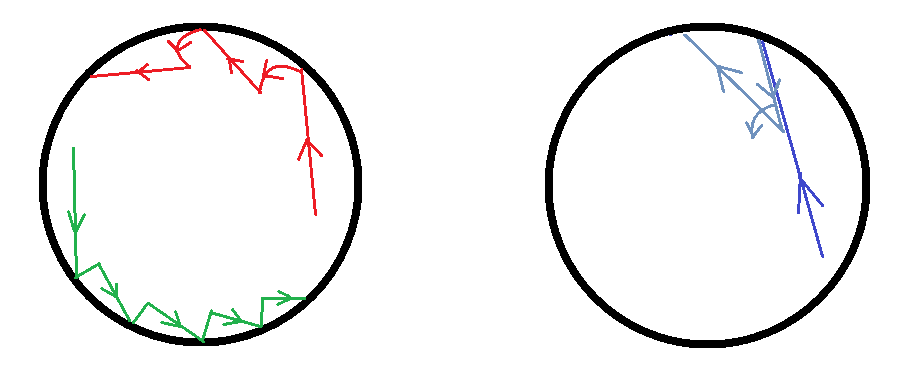
Základom algoritmu je ísť rovno kým nenájde farbu inú ako bielu (štandardne hodnotu nižšiu ako 50), otočí sa, môže kúsok cúvnuť a cyklus sa opakuje. Žiaci musia správnym spôsobom nastaviť všetky parametre pohybov. Úlohu vyriešia vo svojej skupine, riešenie otestujú a predstavia ho ostatným.